Digital Control of Dynamic Systems 3rd edition Solution Manual
download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format is about the use of digital computers in the real-time control of dynamic systems such as servomechanisms, chemical processes, and vehicles that move over water, land, air, or space. The material requires some understanding of the Laplace transform and assumes that the reader has studied linear feedback controls. The special topics of discrete and sampled-data system analysis are introduced, and considerable emphasis is given to the z-transform and the close connections between the z-transform and the Laplace transform. to more digital control of dynamic systems 3rd edition solution manual pdf click here.
download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format emphasis is on designing digital controls to achieve good dynamic response and small errors while using signals that are sampled in time and quantized in amplitude. Both transform (classical control) and state-space (modern control) methods are described and applied to illustrative examples. The transform methods emphasized are the root-locus method of Evans and frequency response. The root-locus method can be used virtually unchanged for the discrete case; however, Bode’s frequency response methods require modification for use with discrete systems. The stale-space methods developed are the technique of pole assignment augmented by an estimator (observer) and optimal quadratic- loss control.
download file
digital control of dynamic systems 3rd edition solution manual pdf
Digital Control of Dynamic Systems 3rd edition Solution Manual
The optimal control problems use the steady-state constant-gain solution; the results of the separation theorem in the presence of noise are stated but not proved. Each of these design methods-classical and modem alike-has advantages and disadvantages, strengths and limitations. It is our philosophy that a designer must understand all of them to develop a satisfactory design with the least effort. Closely related to the mainstream of ideas for designing linear systems that result in satisfactory dynamic response are the issues of sample-rate selection, model identification, and consideration of nonlinear phenomena. Sample-rate selection is discussed in the context of evaluating the increase in a least-squares performance measure as the sample rate is reduced in download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format.
The topic of model making is treated as measurement of frequency response, as well as least-squares parameter estimation. Finally, every designer should be aware that all models are nonlinear and be familiar with the concepts of the describing functions of nonlinear systems, methods of studying stability of nonlinear systems, and the basic concepts of nonlinear design. Material that may be new to the student is the treatment of signals which are discrete in time and amplitude and which must coexist with those that are continuous in both dimensions.
The philosophy of download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format is that new material should be closely related to material already familiar, and yet, by the end, indicate a direction toward wider horizons.
download free Franklin 3rd edition Solution Manual book in pdf format
For more sophisticated methods, we present the elementary parts of quadratic-loss Gaussian design with minimal proofs to give some idea of how this powerful method is used and to motivate further study of its theory. The use of computer-aided design (CAD) is universal for practicing engineers in download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format , as in most other fields. We have recognized this fact and provided guidance to the reader so that learning the controls analysis material can be integrated with learning how to compute the answers with MATLAB, the most widely used CAD software package in universities. In many cases, especially in the earlier chapters, actual MATLAB scripts are included in the text to explain how to carry out a calculation. In other cases, the MATLAB routine is simply named for reference.
All the routines given are tabulated in Appendix E for easy reference; therefore, this book can be used as a reference for learning how to use MATLAB in control calculations as well as for control systems analysis. In short, we have tried to describe the entire process, from learning the concepts to computing the desired results. But we hasten to add that it is mandatory that the student retain the ability to compute simple answers by hand so that the computer’s reasonableness can be judged. The First Law of Computers for engineers remains In, Garbage; Most of the graphical figures in this third edition were generated using MATLAB supplied by The Mathworks, Inc.
Analysis methods and chapters content of this mechanical ebooks
The reader is encouraged to use these MATLAB figure files as an additional guide in learning how to perform the various calculations. To review the chapters briefly: Chapter 1 contains introductory comments. Chapters 2 and 3 of download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format are new to the third edition. Chapter 2 is a review of the pre- requisite continuous control; Chapter 3 introduces the key effects of sampling in order to elucidate many of the topics that follow. Methods of linear analysis are presented in Chapters 4 through 6.
Chapter 4,5 and 6 introduces combined discrete and continuous systems, the sampling theorem, and the phenomenon of aliasing. The basic deterministic design methods are presented in Chapters 7 and 8-the root-locus and frequency response methods in Chapter 7 of download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format and pole placement and estimators in Chapter 8. The state-space material assumes no previous acquaintance with the phase plane or state space, and the necessary analysis is developed from the ground up.
Some familiarity with simultaneous linear equations and matrix notation is expected, and a few unusual or more advanced topics such as eigenvalues, eigenvectors, and the Cayley-Hamilton theorem are presented in Appendix C. Chapter 9 introduces optimal quadratic-loss control: First the control by state feedback is presented and then the estimation of the state in the presence of system and measurement noise is developed, based on a recursive least-squares estimation derivation.
table of content in chapter 10 to end of Digital Control of Dynamic Systems
In Chapter 10 of download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format the nonlinear phenomenon of amplitude quantization and its effects on system error and system dynamic response are studied. Chapter 11 presents methods of analysis and design guidelines for the selection of the sampling period in a digital control system. It utilizes the design methods discussed in Chapters 7, 8, and 9, in examples illustrating the effects of sample rate.
Chapter 12 of download free Digital Control of Dynamic Systems by Franklin 3rd edition Solution Manual book in pdf format introduces both nonparametric and parametric identification. Nonparametric methods are based on spectral estimation. Parametric methods are introduced by starting with deterministic least squares, introducing random errors, and completing the solution with an algorithm for maximum likelihood. Sub-space methods are also introduced for estimating the state matrices directly. Nonlinear control is the subject of Chapter 13, including examples of plant non- linearities and methods for the analysis and design of controllers for nonlinear models. Simulation, stability analysis, and performance enhancement by non- linear controllers and by adaptive designs are also included in Chapter 13. The chapter ends with a nonlinear design optimization alternative to the techniques presented in Chapter 9.
The final chapter, 14, is a detailed design example of a digital servo for a disk drive head. Table P.1 shows the differences between the second and third editions of the book.
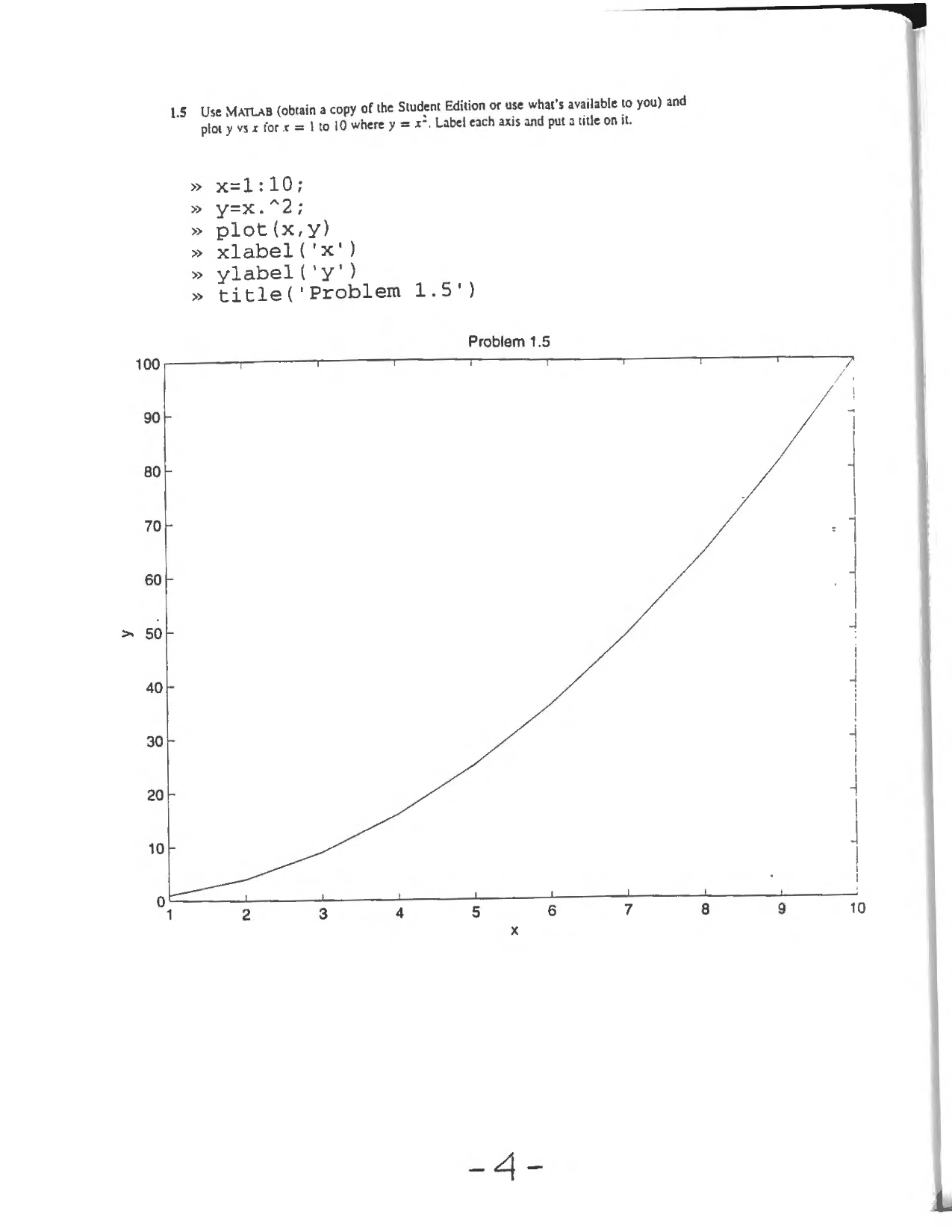
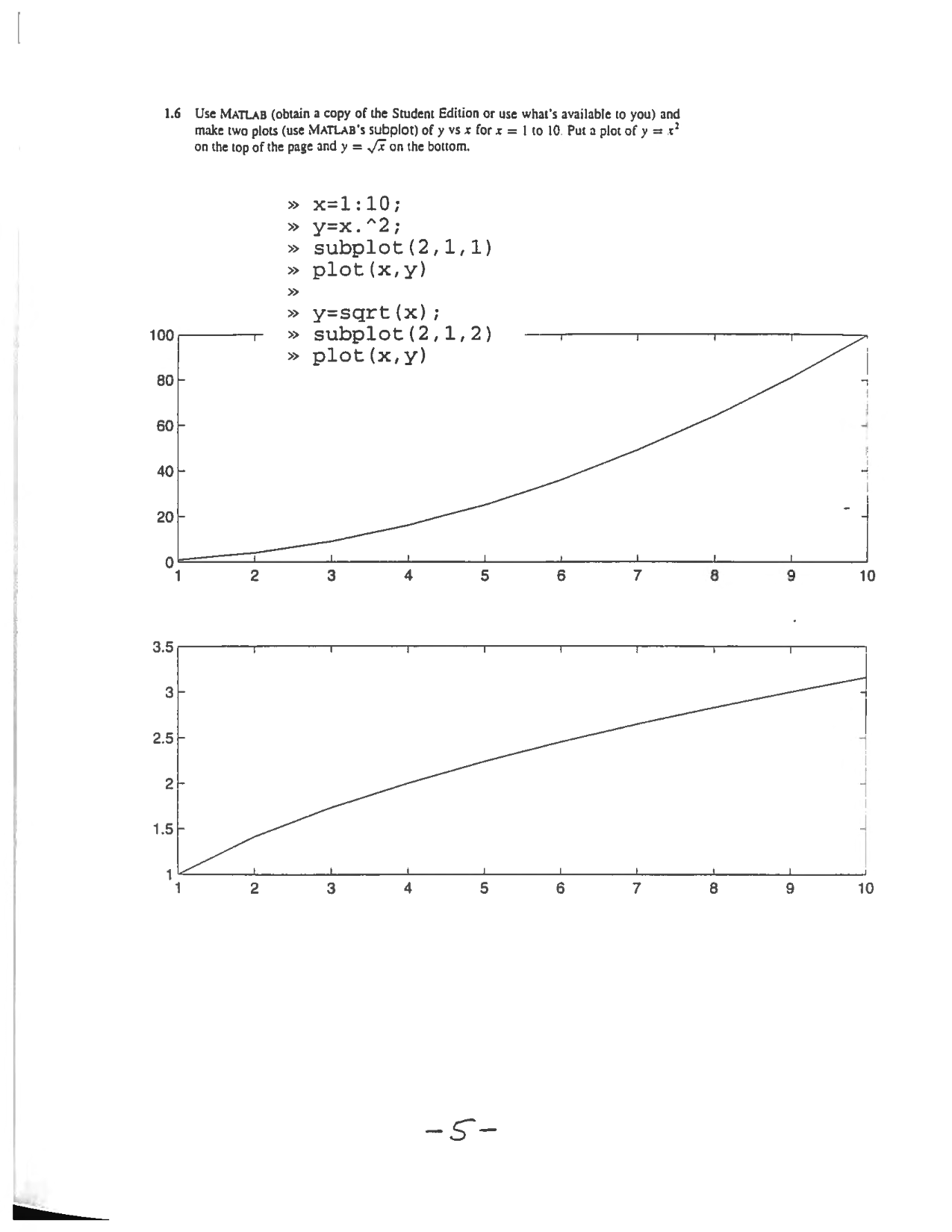
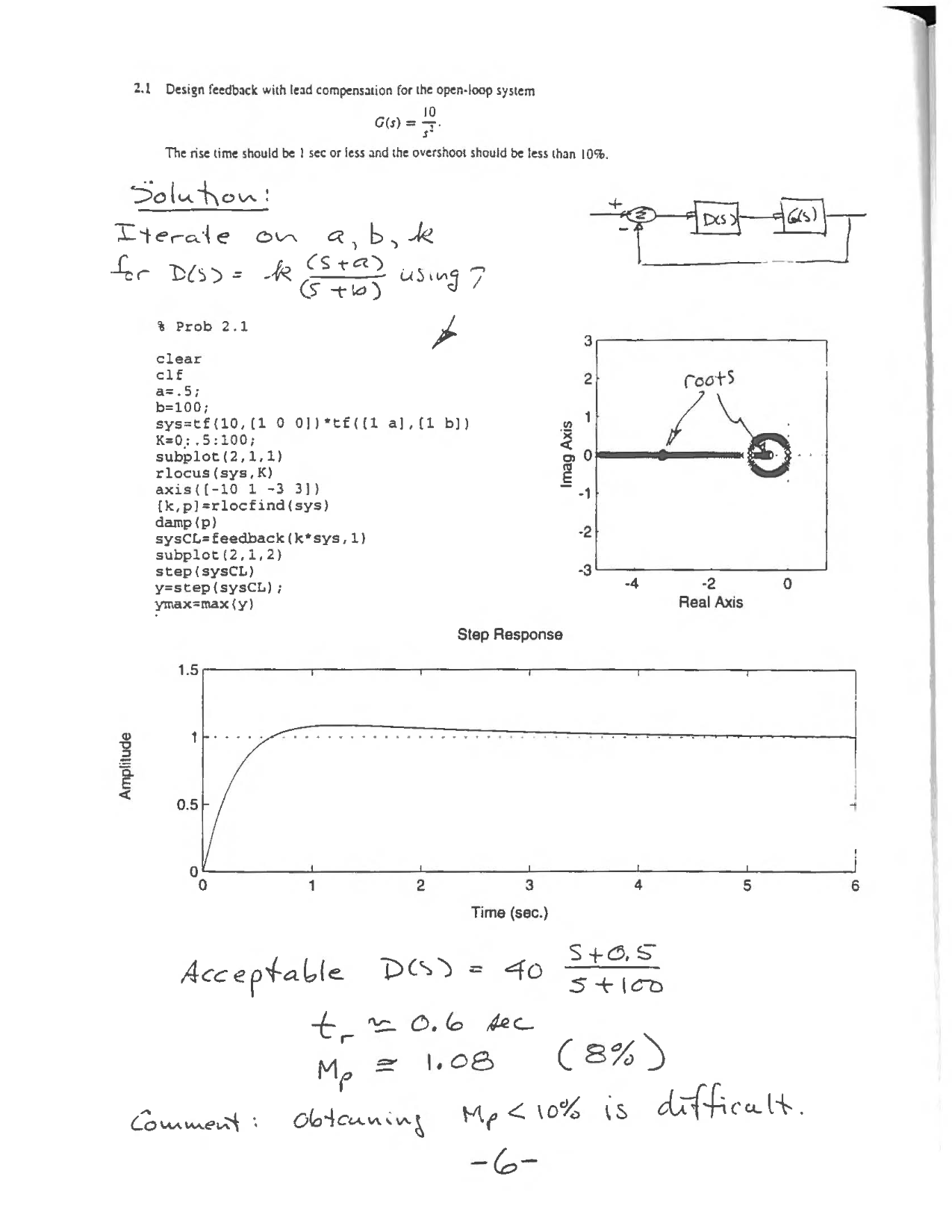
Sample screenshots of the file :
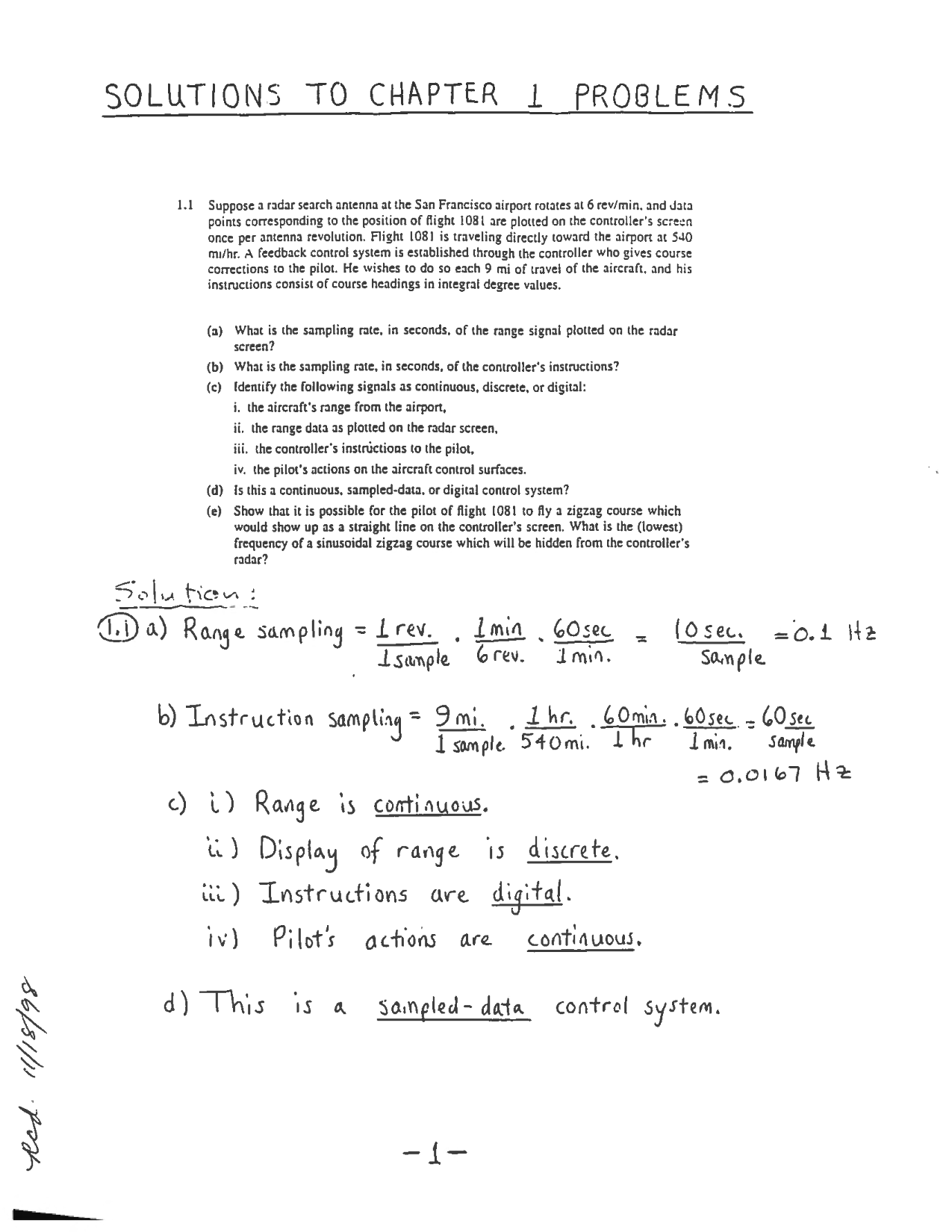
download free Solution Manual Digital Control of Dynamic Systems 3rd edition by Franklin book in pdf format | answers & solutions
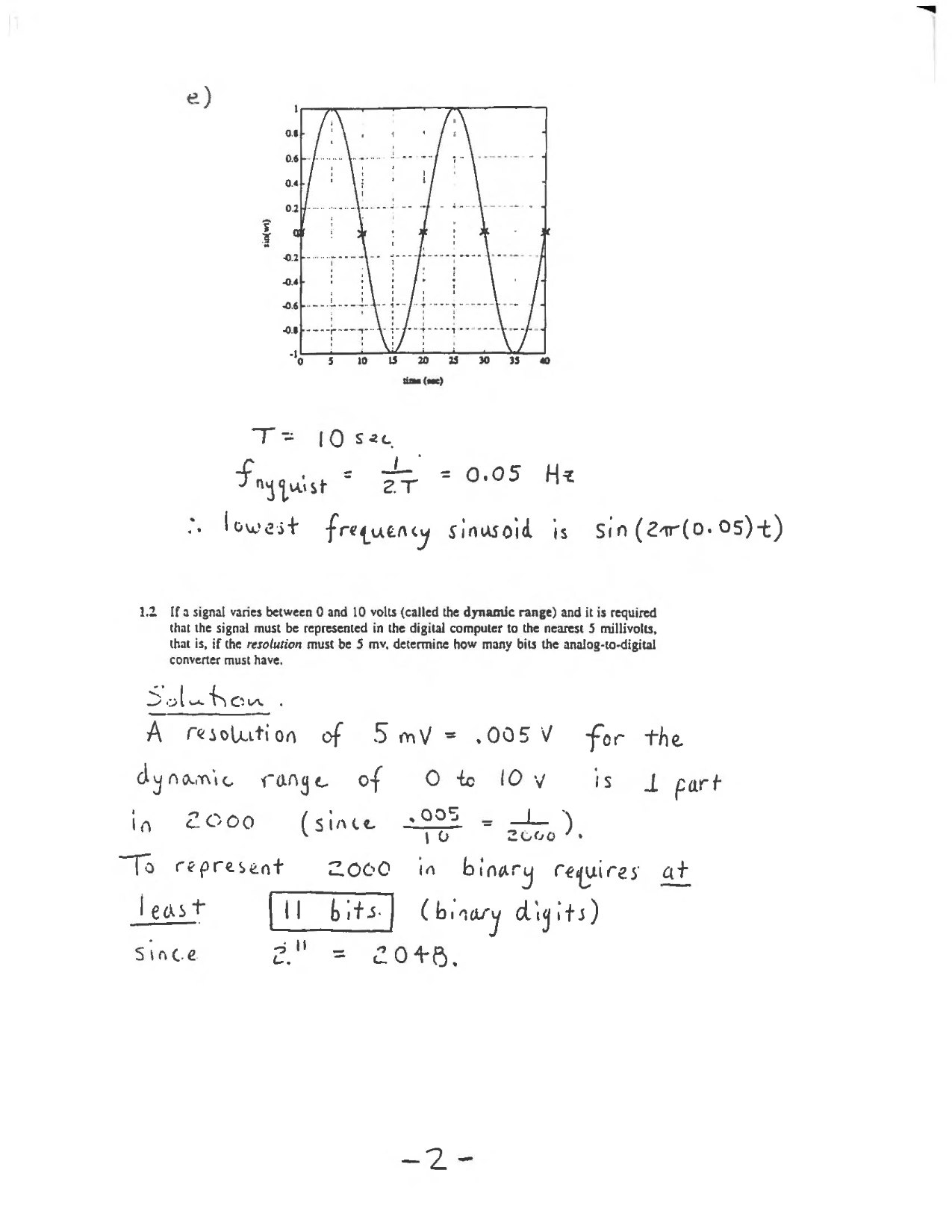
download free Solution Manual Digital Control of Dynamic Systems 3rd edition by Franklin book in pdf format | answers & solutions
download free Solution Manual Digital Control of Dynamic Systems 3rd edition by Franklin book in pdf format | answers & solutions
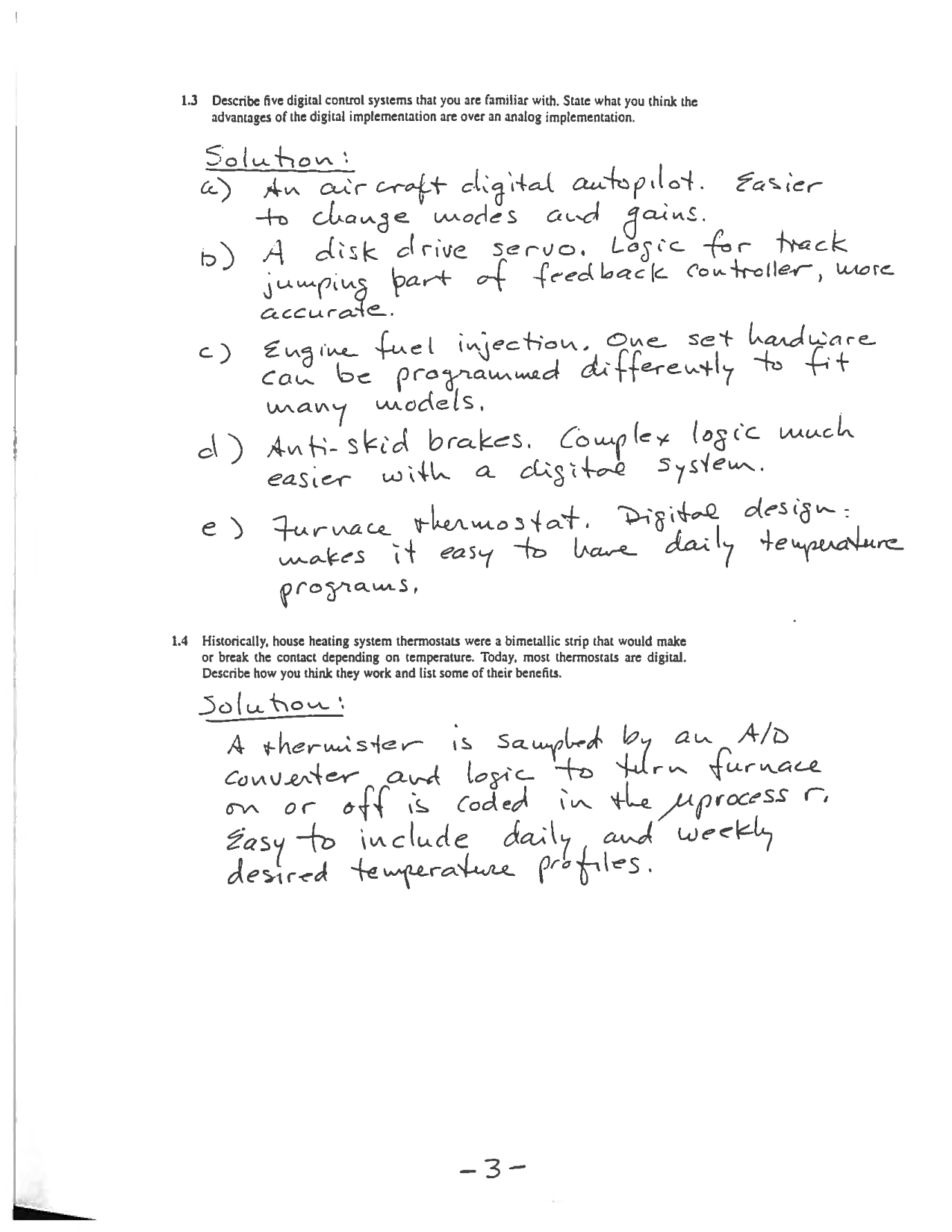
download free Solution Manual Digital Control of Dynamic Systems 3rd edition by Franklin book in pdf format | answers & solutions
download free Solution Manual Digital Control of Dynamic Systems 3rd edition by Franklin book in pdf format | answers & solutions
download file
digital control of dynamic systems 3rd edition solution manuals pdf ebook